Dreamscape
Dreamscape is an interactive projection installation that lets you visualize and experience the depth of your dreams. The guests are asked to share their dreams through a text prompt, after which they are invited to explore their dream by ‘painting’ it on a wall using full-body movement. Throughout the experience they witness their dreams evolve and shift, continuously morphing to the shape of their body and capturing their movement history. The piece was created in April 2023, in the wake of accessible text-to-image generative AI. It uses custom-made stable diffusion integration, TouchDesigner, Kinect, and p5.js.
Fiber Optic Cables: Recreating Bioluminescence
Co-created with Long L
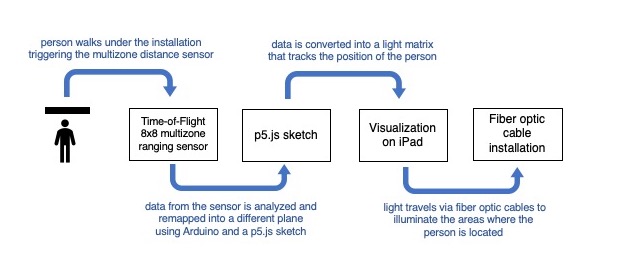
Long and I were fascinated by fiber-optic cables’ ability to transmit light across incredibly large distances. We decided to use this property to recreate the magic of bioluminescent plankton. The idea of the installation was similar to what you would experience when interacting with the plankton: when the water is mechanically stimulated the plankton lights up in beautiful cyan color. In the installation when a person walks under a certain part of the installation the fiber-optics light up around them.
We used a Time-of-Flight 8x8 Imager in combination with p5.js sketch to create a position tracking system and an illuminating pipeline. The process is shown in the diagram below:

Cubid Interrupted: Sentient Robot Ballet
Co-created with Dror Margalit and Karina Chow
Duncan and Sasha are two love struck robots whose common passion is ballet. But they like to keep their relationship extremely private, dancing together only when no humans are present. When humans disturb their peace, Duncan and Sasha stop their dance and run away, waiting until no one is around. When they are alone, they once again find each other and continue their courting dance.
This was a sensor party... Duncan and Sasha are Arduino controlled mobile robots who communicate through Bluetooth and are equipped with three sensors and a custom obstacle avoidance algorithm. They start their dance when no humans are present. Their dance is choreographed and is coordinated via Bluetooth. If a human is in the vicinity of the robots the SparkFun Human Presence Sensor Breakout is triggered and the robots scurry away and after some time freeze-up, waiting. Both Duncan and Sasha are equipped with Ultrasonic Distance Sensors to help them avoid obstacles. When humans leave and are no longer detected, Duncan and Sasha try to find each other once again: Sasha begins to spin and emit infrared (IR) signal, while Duncan looks for the signal with an IR detection sensor. When the line-of-sight is established, they drive towards each other and when they are within 15 centimeters, they restart their dance. If no line-of-sight is established, they continue their lonely journey without one another. And such is life.
This project was quite challenging in terms of establishing logic, providing sufficient power, and getting all the sensors to work together, but the result was absolutely endearing. Each of the robots had their own personality and their courting behavior was unexpectedly relatable and human.